Very pleased to announce the the Stupid Shit No One Needs & Terrible Ideas Hackathon is returning to New York on November 15th. RSVP here.
Very pleased to announce the the Stupid Shit No One Needs & Terrible Ideas Hackathon is returning to New York on November 15th. RSVP here.
Here is the prototype for my soon-to-be-fully-realized Tinder Robot.
[vimeo http://vimeo.com/109085943 w=640]
It’s pretty basic: a 555 timer that drives a solenoid through a TIP120 transistor. I use two potentiometers and a 100uF capacitor to control the speed of the solenoid, and voltage regulator that allows me to power the solenoid at 24 volts.
Here’s the Eagle schematic:

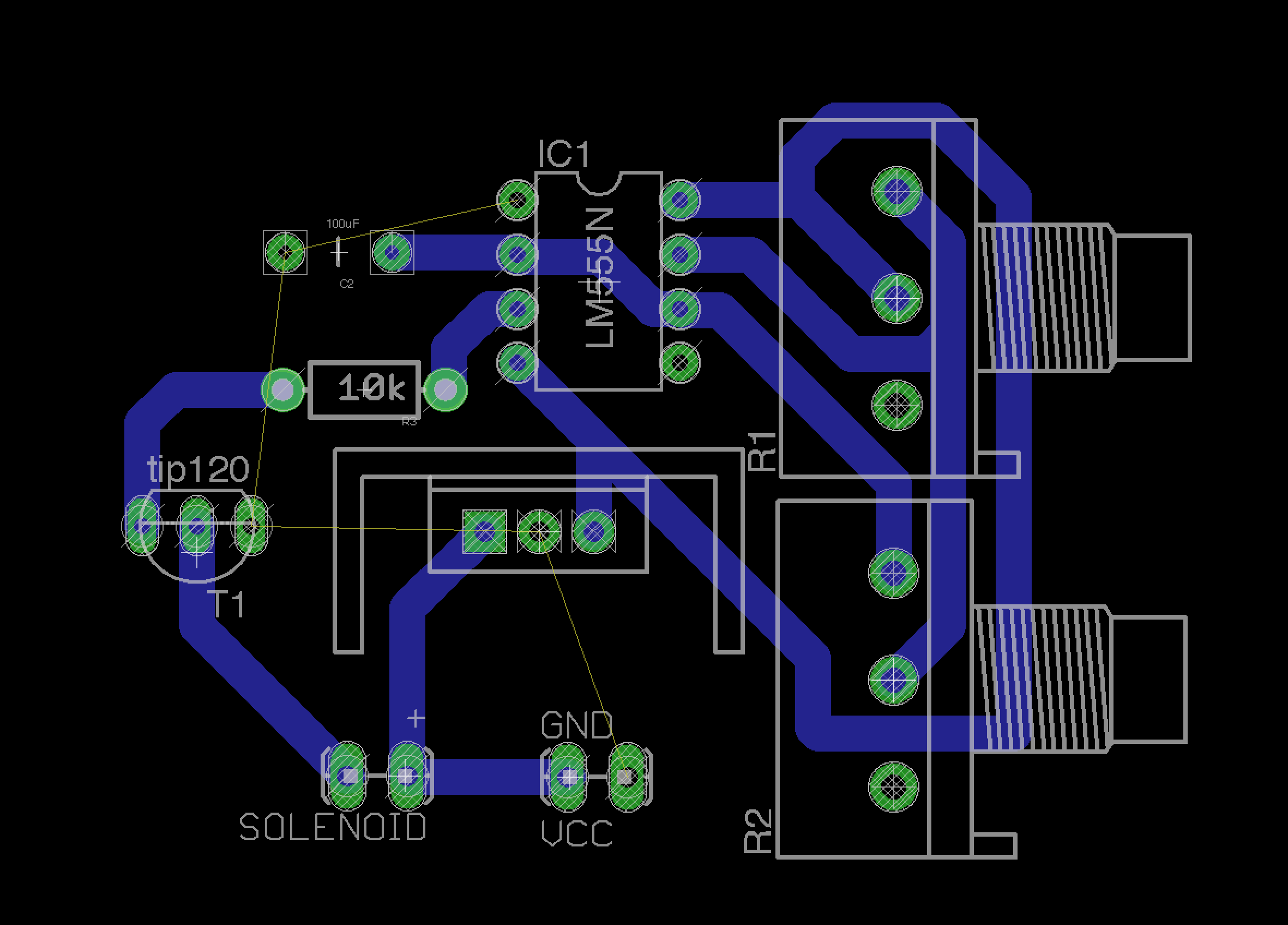
The board layout:
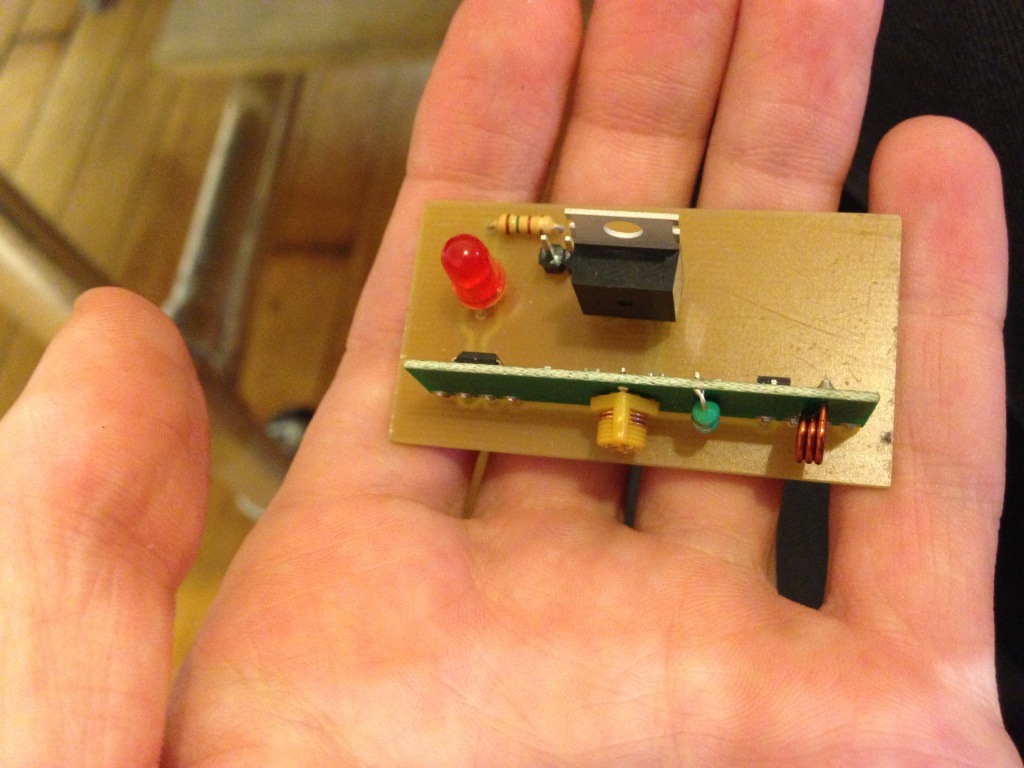
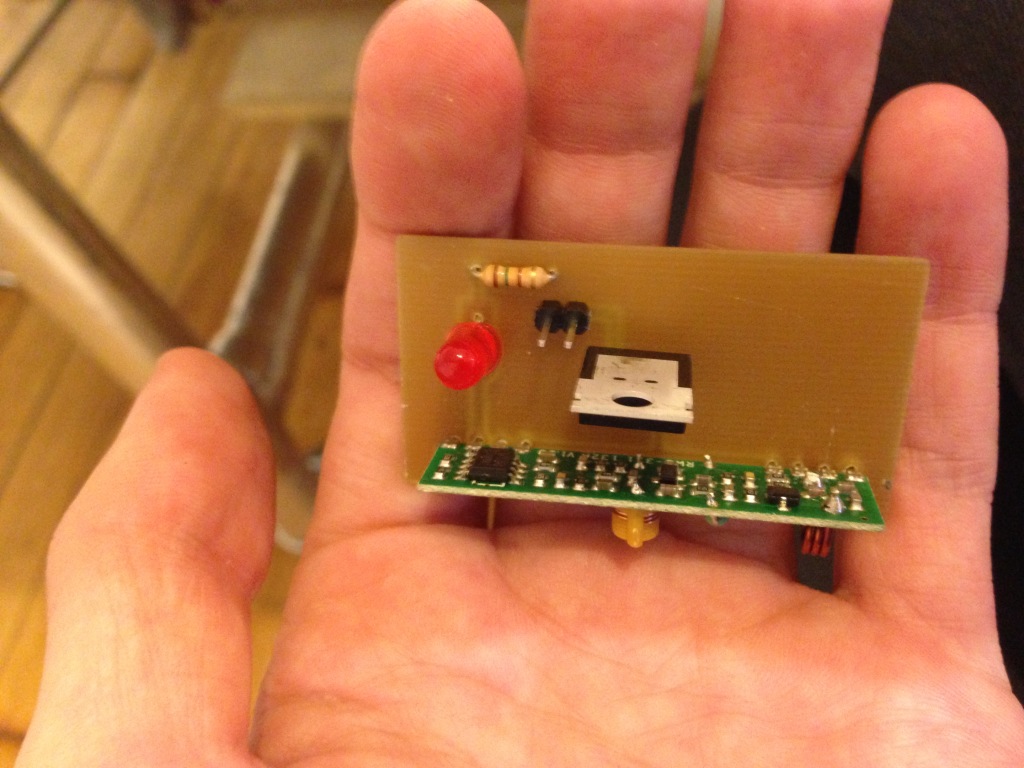
And the finished circuit:

I messed up the Eagle schematic a bit – the base pin for my transistor was different in real life than what showed up in my schematic, so I had to do some weird wiring to get the thing to work.
Here are the parts I used:
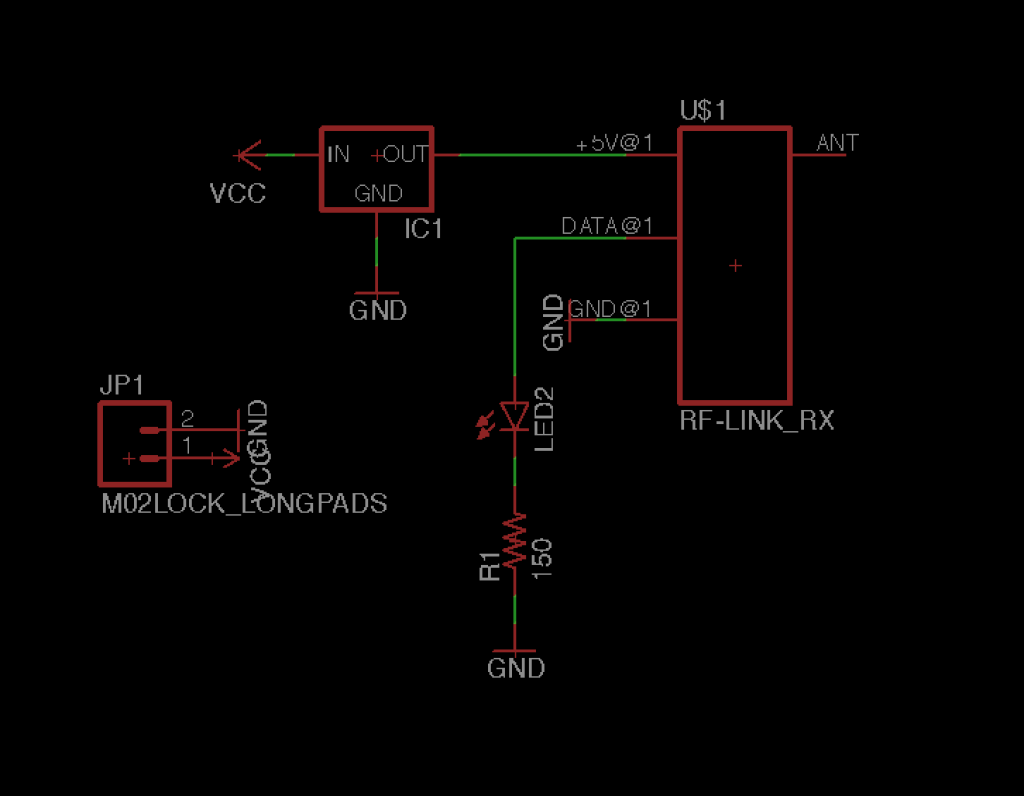
I made a simple circuit based on Eric Rosenthal’s diagram using a Roland Modela milling machine. It’s a radio that lights up an LED when it receives a signal.

This summer Pam Liou and I created “Rubbernecker” an interactive piece that inserts you as a spectator into various historical contexts. It’s currently on display in Manhattan outside the Tisch building, on the corner of Broadway and Waverly. You can also see an online version at rubbernecker.tv (it works best in Chrome but should run in Firefox as well).
Thank you to Audun Mathias Øygard for creating the CLMtracker library that Rubbernecker uses to find, track and deform faces, and thanks also to Brian Clifton and Devin Curry for all their help.
Here are some screenshots:



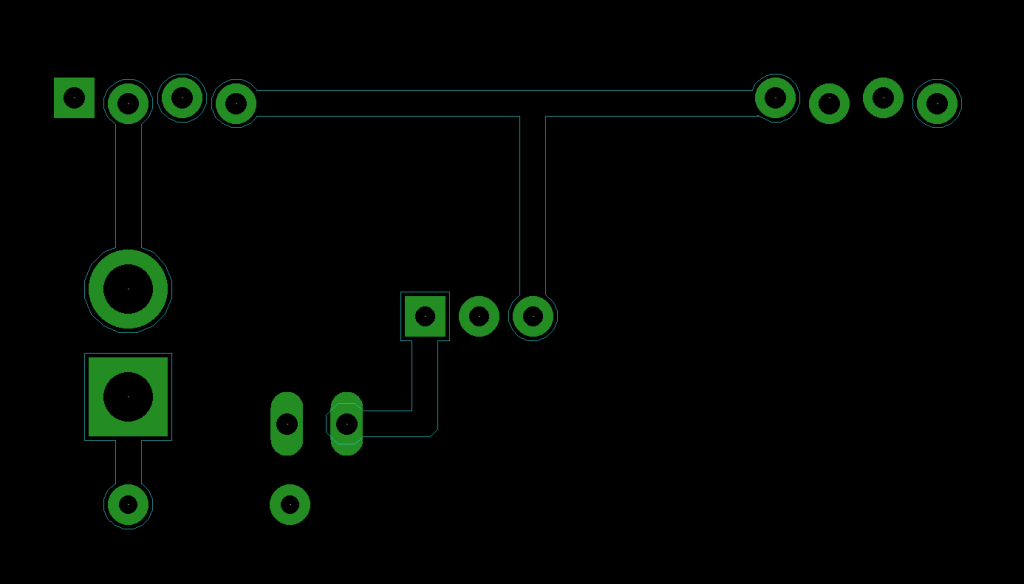
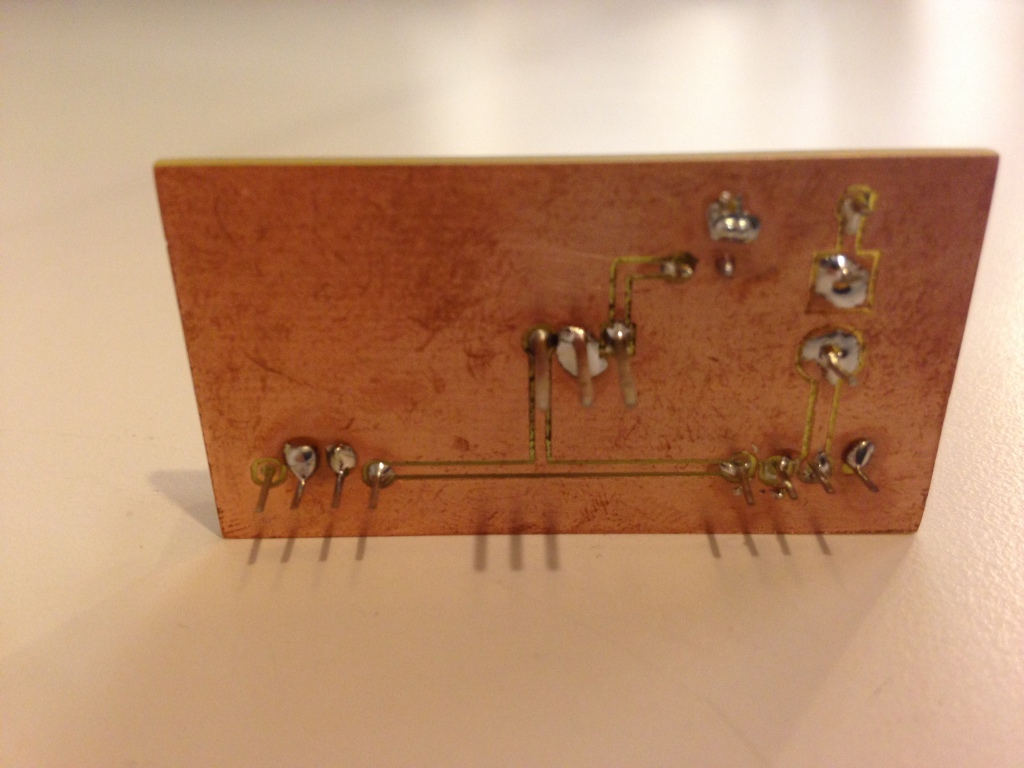
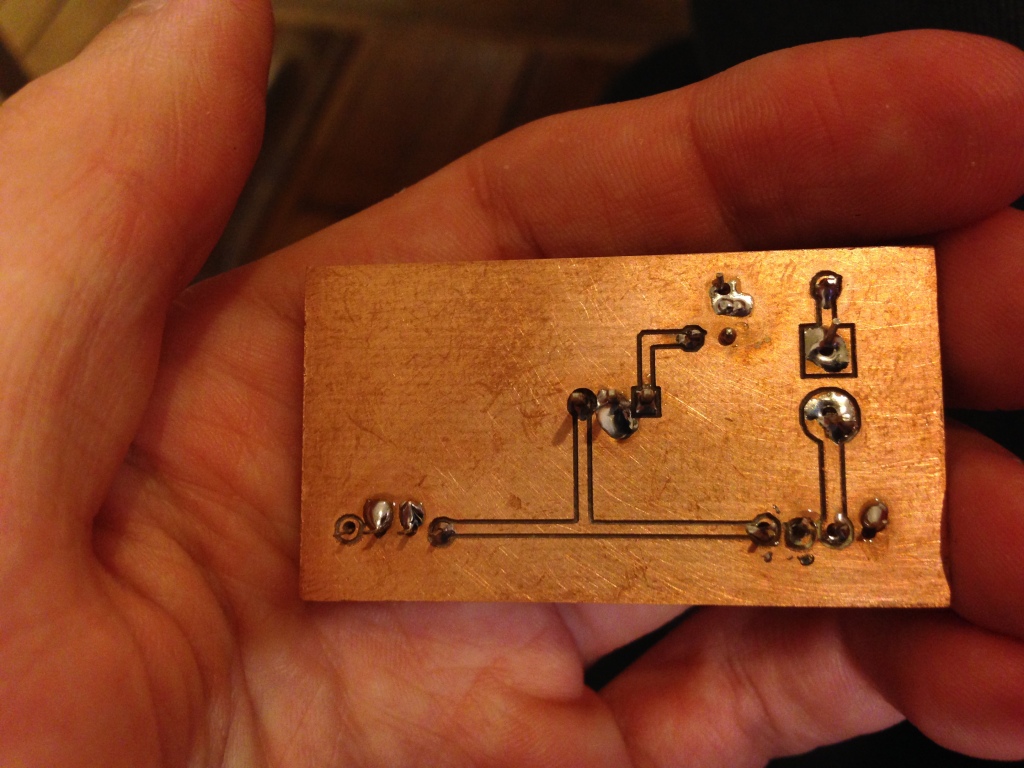
Made my first printed circuit today.

Here’s what it looked like before I scratched off the ink:

And here’s the Eagle layout:
